

 QQ
QQ
库卡机器人伺服系统
注:本文章文字,图片部分来自网络
版权归原作者,侵删。
下面两个点是伺服系统的工作原理和伺服系统的组成 ,然后再下面的就是伺服系统中开环伺服系统和闭环伺服系统的对比,有需要了解的可以多看看。
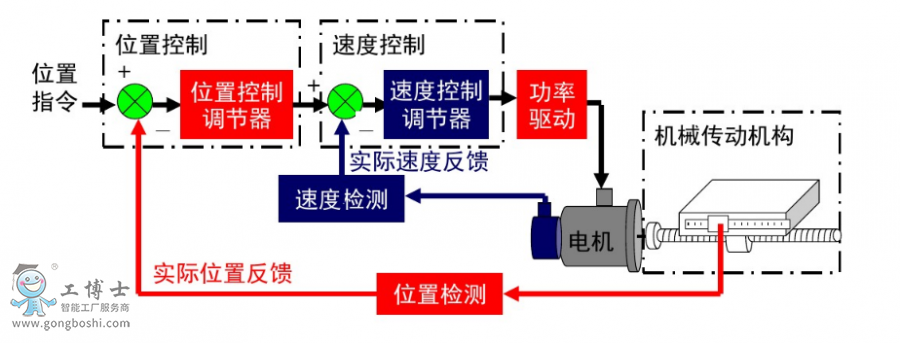
伺服系统的工作原理
位置检测装置将检测到的移动部件的实际位移量进行位置反馈,与位置指令信号进行比较,将两者的差值进行位置调节,变换成速度控制信号,控制驱动装置驱动伺服电动机以给定的速度向着消除偏差的方向运动,直到指令位置与反馈的实际位置的差值等于零为止。
伺服系统的组成
开环与闭环区别在于有无对系统相应环节的检测,开环就是不进行检测,无反馈控制。半闭环和全闭环的区别在于检测位置的不同,全闭环是检测*终执行环节,半闭环检测*终执行环节的驱动环节,对*终的执行机构不做检测。全闭环检测灵精度高,但灵敏度过大,不利于成本和维修。半闭环精度之中,灵敏度合适,实用广泛。
一、开环伺服系统的组成
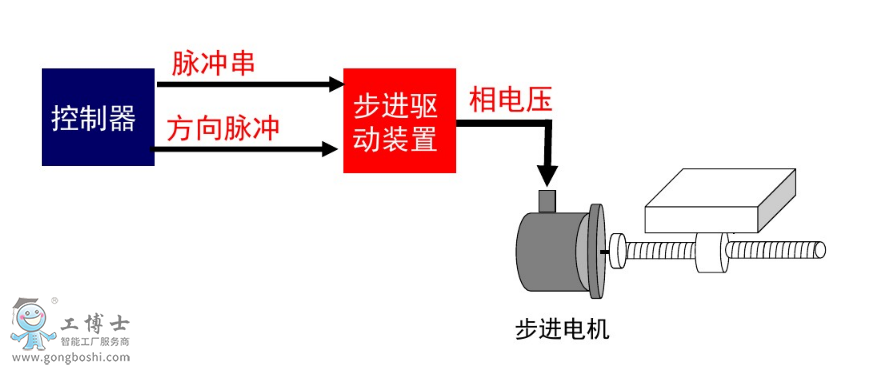
开环伺服系统特点
由控制器送出的进给指令脉冲,经驱动电路控制和功率放大后,驱动步进电机转动,通过齿轮副与滚珠丝杠螺母副驱动执行部件,无需位置检测装置。
系统的位置精度主要取决于步进电机的角位移精度、齿轮丝杠等传动元件的导程或节距精度以及系统的摩擦阻尼特性。
位置精度较低,其定位精度一般可达士0.02mm.如果采取螺距误差补偿和传动间隙补偿等措施,定位精度可提高到土0.01mm.此外,由于步进电机性能的限制,开环进给系统的进给速度也受到限制,在脉冲当量为0.01mm时,一般不超过5m/min。
闭环伺服系统组成
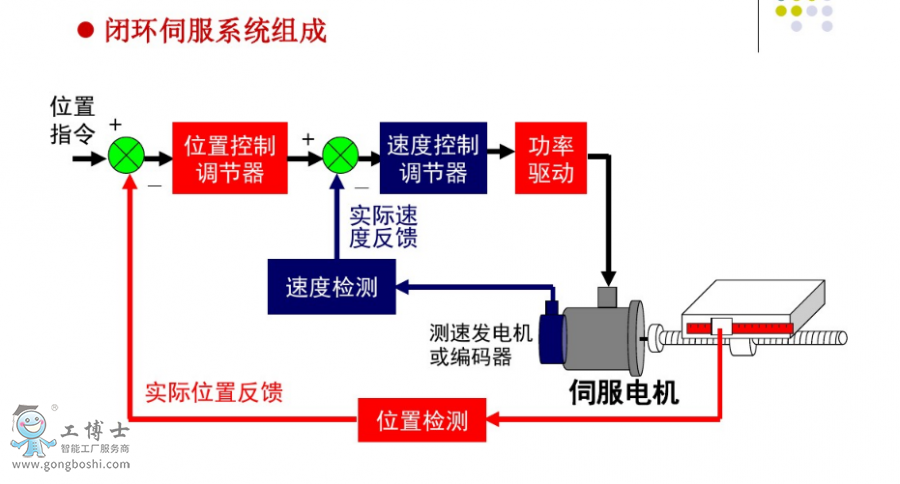
闭环伺服系统特征
将检测装置装在移动部件上,直接测量移动部件的实际位移来进行位置反馈的进给系统称为闭环伺服系统。
闭环同服系统可以消除机械传动机构的全部误差,而半闭环伺服系统只能补偿部分误差,因此,半闭环伺服系统的精度比闭环系统的精度要低一些。
由于采用了位置检测装置,所以,闭环进给系统的位置精度在其他因素确定之后,主要取决于检测装置的分辨率和精度。
闭环和半团环伺服系统因为采用了位置检测装置,所以在结构上较开环进给系统复杂。另外,由于机械传动机构部分或全部包含在系统之内,机械传动机构的固有频率、阻尼、间隙等将成为系统不稳定的因素,因此,闭环和半闭环系统的设计和调试都较开环系统困难。
上面就是闭环伺服系统和开环伺服系统的的特征以及工作原理和组成,各自都有自己的优势所在,可以根据需要自己选择。
