

 QQ
QQ
1.2 库卡机器人纠正刀具(焊枪)
该程序是“COR_T1”新的版本。优越性是在程序文件中不必进行修改。该程序可以用于检查,如果有必要,纠正TCP遵循的碰撞。然后刀具不用重新进行校准。

在刀具执行校准之前下列步骤必须进行。不再可能遵循碰撞由于没有有效的参考点。
参考点
首先要求空间上有一个固定的参考点。这可能是一个墙上安装的测量尖,比如,这个参考点千万不要移动或移开(因而工作台上放置一个测量尖是不够的)!
校准
然后使用校准程序(如XYZ–4点方式)之一来校准刀具(例如焊炬)。确认刀具应处于尽可能远离测量尖的地方,仅在一个专一看的见的点处接触它。当执行程序时,刀具将移动到具有定位的参考点。如果刀具笨拙地相对于测量尖定位,刀具可能与测量尖碰撞导致双方损坏。
刀具仍定位在校准点,使用变量校准功能调用变量“REF_PT[x]”。作为新的值输入“$POS_ACT”。这样,当前的坐标作为参考点来使用。
关于校准更多的信息可以参考操作手册,【调试】文件,【校准】章。
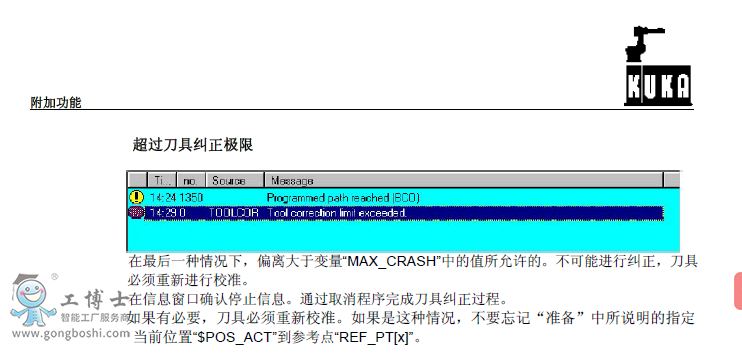
允许的偏离MAX_CRASH)
在参考点和刀尖之间大允许的偏离以mm计算,将使用这个来执行自动校准,偏离可
以使用变量“MAX_CRASH”来改变。该值可以使用变量纠正功能来修改或直接在文件
“C:\KRC\Roboter\KRC\R1\System\$CONFIG.DAT”中修改。
附加功能
1.2.2 刀具纠正

1
1

